当前,全球制造业正加速向智能化、柔性化转型,服务领域的无人化趋势也日益显著,共同推动了协作机器人、服务机器人及智能家居市场的爆发式增长。在这一进程中,机器人与人类工作、生活场景的深度共融,对其核心执行部件——伺服系统,提出了更高要求:不仅需要实现高精度控制与快速动态响应,还必须在严苛的成本与紧凑的尺寸约束下达成这一目标。

为精准应对这一市场挑战,极海半导体正式推出基于APM32F425/427系列芯片的总线型低压伺服解决方案。
方案优势与价值
全面的闭环控制:集成位置、速度、转矩三种闭环模式,适配绝大多数伺服应用场景。
灵活的硬件架构:外设接口丰富,硬件资源可配置,支持深度定制与二次开发。
出色的动态性能:16kHz高频电流环与功率开关,实现快速精准响应,满足高动态负载需求。
高效的调试体验:通过上位机实现参数整定、实时波形显示与故障诊断,降低开发难度,加快上市进程。
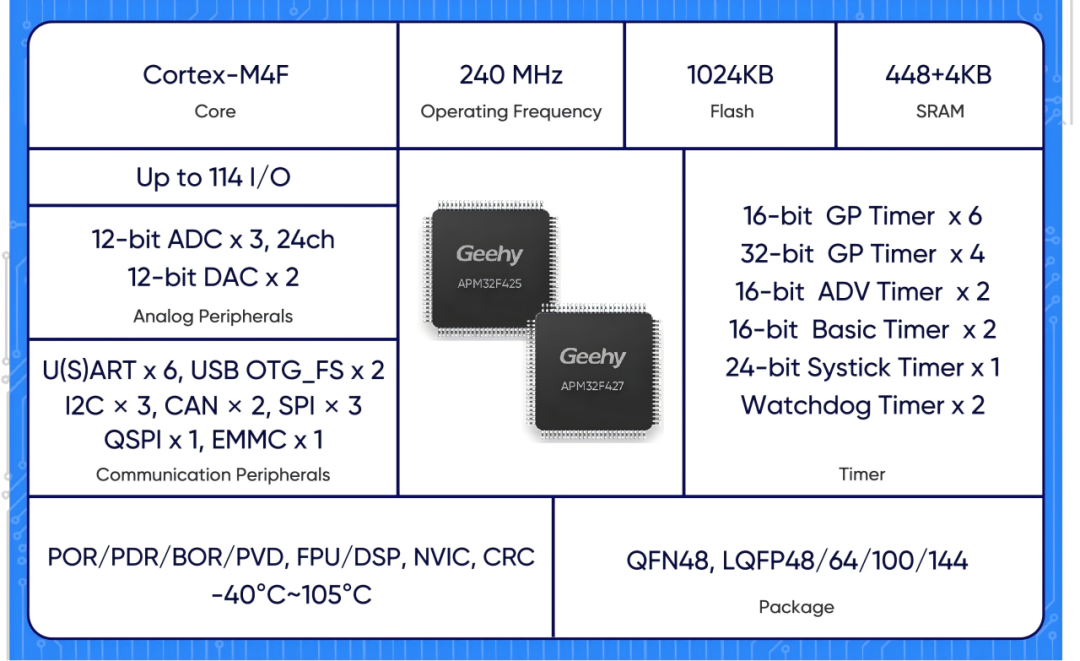
极海APM32F425/427总线型低压伺服方案的核心,是基于极海自主研发的高性能拓展型MCU——APM32F425/427系列构建。该系列芯片搭载Arm®Cortex®-M4F内核,全系列支持在全温度范围内以240MHz主频稳定运行,为高性能控制奠定坚实基础。
在存储配置上,APM32F427系列内置高达1MB的eFlash,并配备448KB+4KB的SRAM;APM32F425系列则支持256KB Flash零等待访问,并内置192KB+4KB的SRAM,为复杂应用提供充裕的内存空间。
得益于这一优秀的硬件设计,该伺服方案在执行相同功能代码时,能够实现更短的执行周期。这不仅提升了系统的实时控制性能,也为客户进行更高效、更复杂的二次开发提供了有力保障。
方案参数
输入电压:20-70V
典型功率:400W
控制周期:62.5us(16kHz)
转速范围:-4000~4000rpm
编码器类型:增量编码器、绝对值编码器(RS485)
控制模式:力矩模式、速度模式、位置模式
额定输出电流(Arms):10
最大输出电流(Arms):25

APM32F425/427系列产品优势
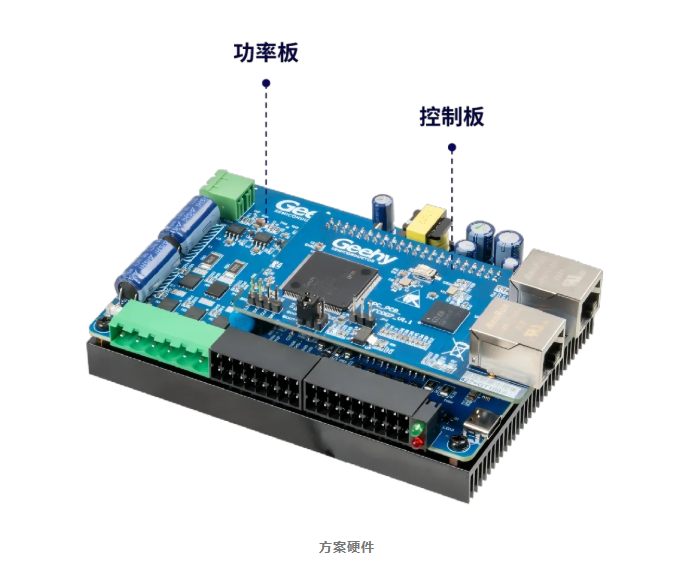
方案硬件系统可拆解:为电源模块、控制核心模块、信号处理模块、功率驱动模块、保护模块五大核心单元,各单元协同实现电流、速度、位置的闭环控制。其技术关键在于:反馈信号的精准采集,PID及扩展算法的优化,功率模块的高效驱动三部分。
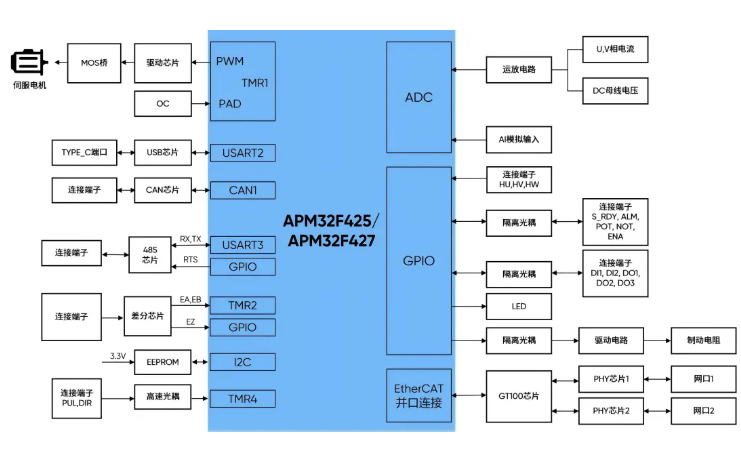
实现方式
通过TMR1模块,产生3组互补PWM信号输出,实现电机矢量控制
通过高精度ADC模块,可实现两路相电流信号的精确采样,提高伺服控制精度
通过UART模块或TMR模块,实现绝对值编码器和增量编码器通信
通过并口模块,与EtherCAT从站芯片高效通信,实现EtherCAT总线控制
通过UART模块,实现与上位机的数据交互
通过I2C模块,实现外部EEPROM通讯,存储伺服关键参数
丰富的输入输出端口,满足多种控制信号输入或状态输出,提升方案的多场景适用性
方案软件
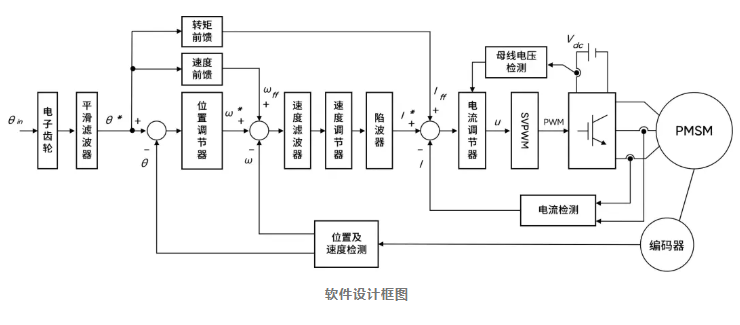
软件设计方案采用三环级联模式:
电流环,其给定来自速度环的输出,实现对给定电流的快速跟踪,并对直流母线电压的波动,反电动势的影响,以及被控对象的非线性等因素起到抑制作用。
速度环,其给定来自位置环的输出,也接受来自外部模拟量或者内部多段速的给定,实现对给定速度的跟踪,并抑制负载扰动对系统的影响。
位置环,其位置给定来自总线控制时直接写入的绝对位置值或者增量位置值、IO控制的多段内部设定位置的给定,实现对位置给定的精确定位,并且通过PID调节来保证无超调。
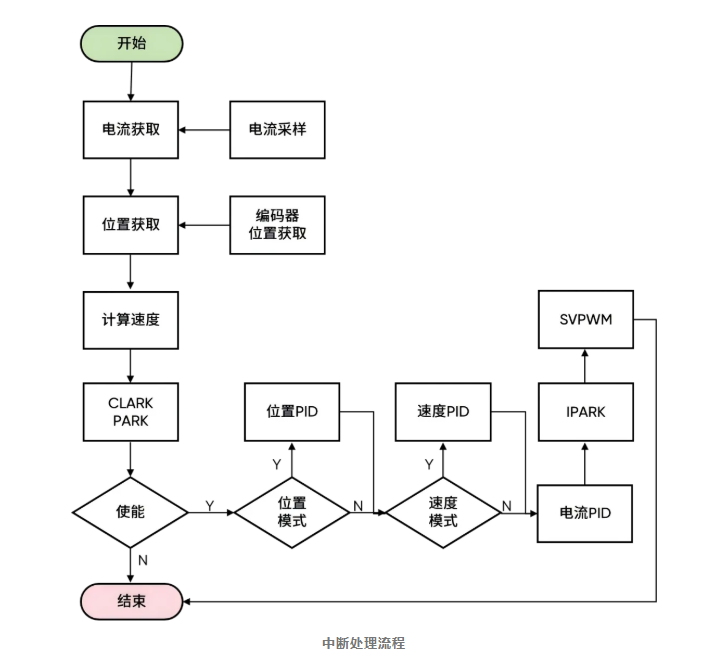
方案采用简易的单中断处理的设计架构,可以实现电机三环闭环控制,客户可以在此基础上进行自定义功能扩展,可支持客户更高性能,更丰富功能的产品设计。
测试数据
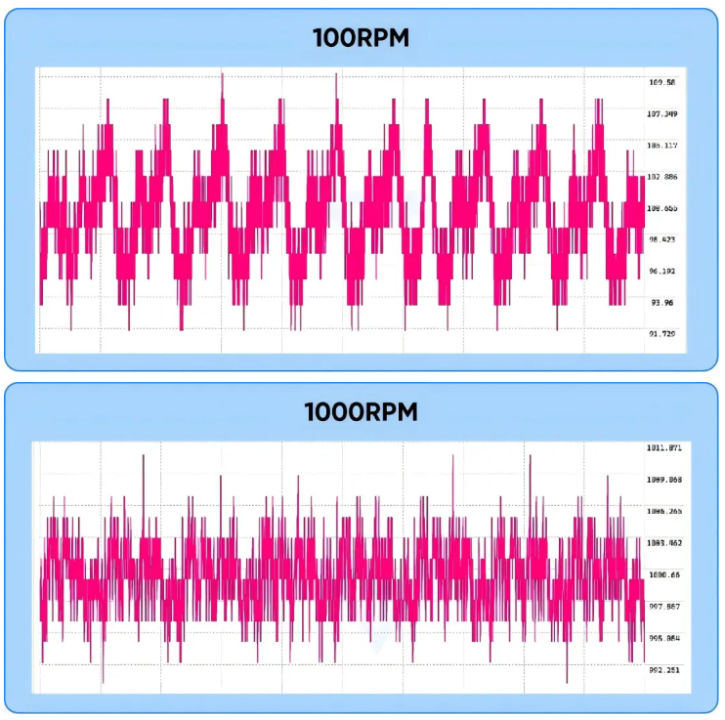
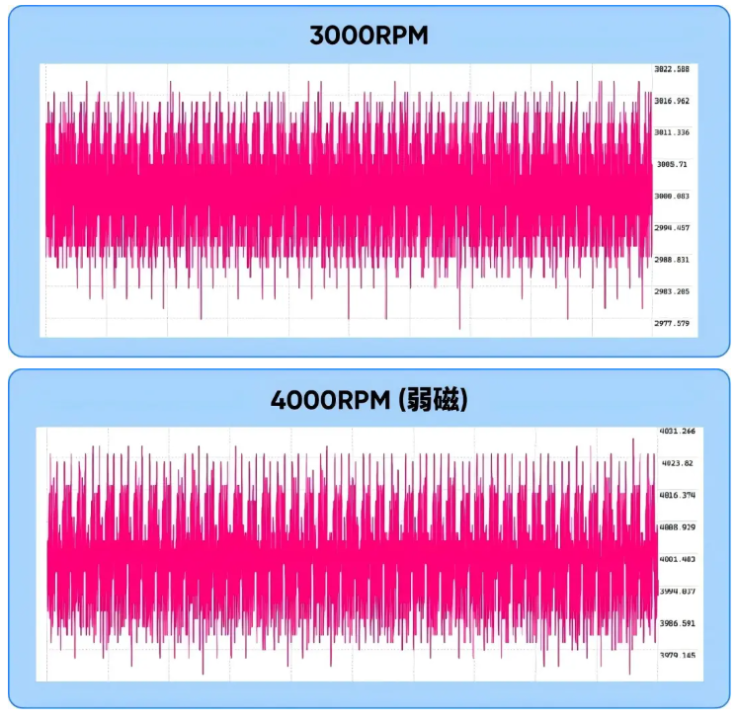
1.速度波动实验测试
搭载17位磁编码器下的实测各个速度段波形效果如下:
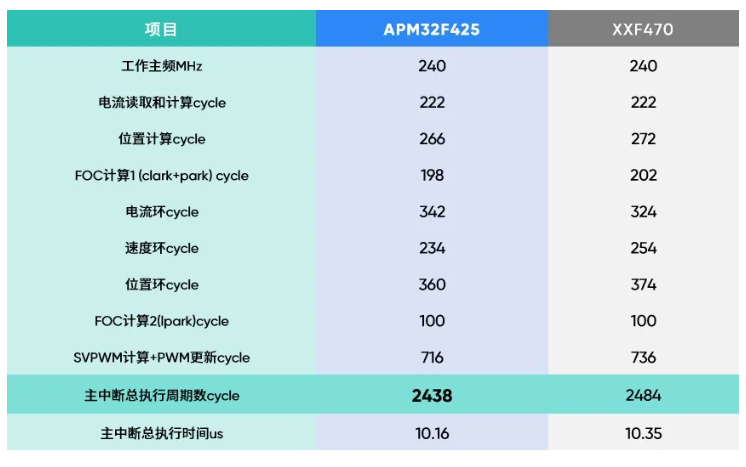
2.执行效率测试
通过测试对比,具备零等待配置的APM32F425与同类型产品的代码执行效率对比,结果相当,略胜一筹。
APM32F425/427总线型低压伺服方案,涵盖较为完整的软硬件设计,内含全功能软件固件以及极海自研伺服控制上位机,配有详细的使用手册,方便快速使用,性能评估以及二次开发。配套的资料可联系极海代理商-联科芯微电子。联系电话:15994707769,LEO WANG。