随着现在工业自动化与消费电子领域对电机控制需求的逐渐攀升,像无感方波控制因其省去了板上位置及传感器的设计特性,在BLDC/PMSM驱动中显得尤为重要。Geehy极海APM32M3514系列MCU凭借其内置高速比较器与增强型PWM定时器,为无感方波控制提供了更具性价比的片上解决方案。那么,如果我们我们选用具有内部比较器的芯片,电路需要如何设计呢,以APM32M3514为例,它内部集成了硬件比较器功能。
一、极海APM32M3514内部比较器方案设计要点
通过内部模拟开关动态切换分压比(支持24V/48V系统),避免外部电阻网络冗余。
1.硬件架构优化
反电动势(BEMF)检测电路设计
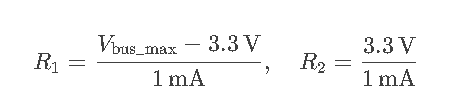
分压网络参数计算:
通过内部模拟开关动态切换分压比(支持24V/48V系统),避免外部电阻网络冗余。
采样时序优化:
在PWM中心对齐模式的电流续流阶段触发BEMF采样,规避开关噪声干扰。
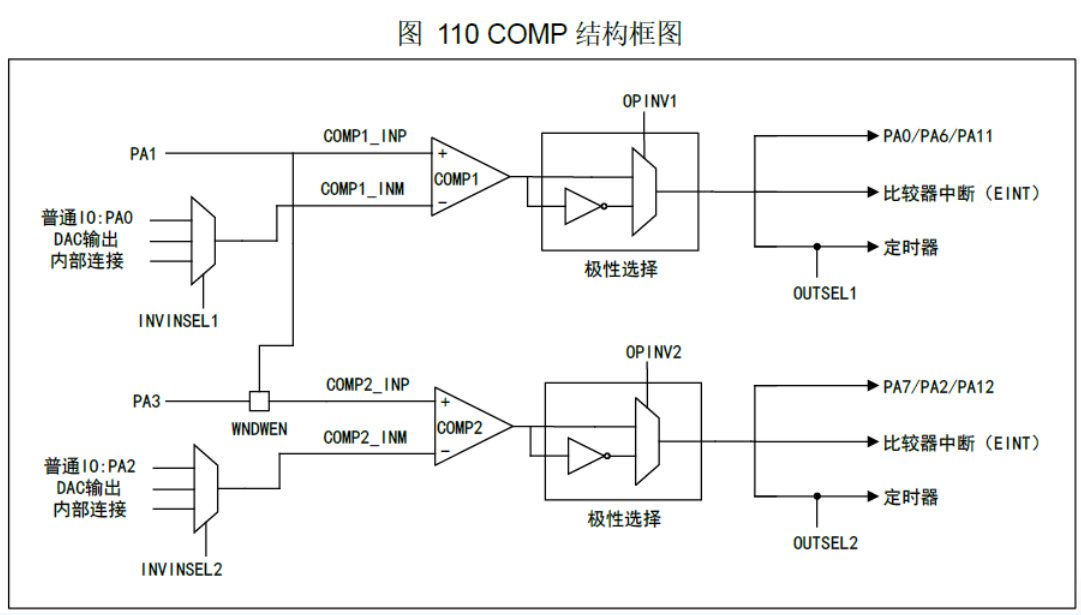
比较器与PWM联动配置
硬件互锁机制:
比较器输出直连TIM1刹车输入(BKIN),触发PWM硬件级闭锁(响应时间<200ns)。
支持过流/过压保护的自动故障处理,无需软件介入。
2.软件算法实现
零交叉检测(ZCD)自适应消抖
// 消抖计数器阈值与换相逻辑
#define ZCD_DEBOUNCE_COUNT 3
void COMP1_IRQHandler(void) {
if (COMP_GetFlagStatus(COMP1, COMP_FLAG_C1OUT)) {
zcdCounter++;
if (zcdCounter >= ZCD_DEBOUNCE_COUNT) {
Motor_Commutation(); // 换相动作
zcdCounter = 0;
}
}
COMP_ClearFlag(COMP1, COMP_FLAG_C1OUT);
}
速度闭环控制:
基于BEMF周期测速法,PI参数整定:

示例代码:
示例代码:
PID_Init(&speedPID, 0.12f, 0.008f, 0, 1000); // KP=0.12, KI=0.008
二、内部vs.外部比较器方案对比

三、典型应用场景优化建议
智能家电(空调风机)
静音启动:利用自适应换相策略消除启动抖动。
低功耗设计:休眠模式下整机功耗<50μA。
工业传送带调速
宽电压支持:DC12-48V输入,内置Buck电路供电。
抗振动设计:硬件消抖算法适应机械振动场景。
新能源汽车(电动水泵)
AEC-Q100认证:支持-40°C~125°C工作温度。
故障诊断:实时监测绕组短路/开路状态。
四、实测性能与优势验证
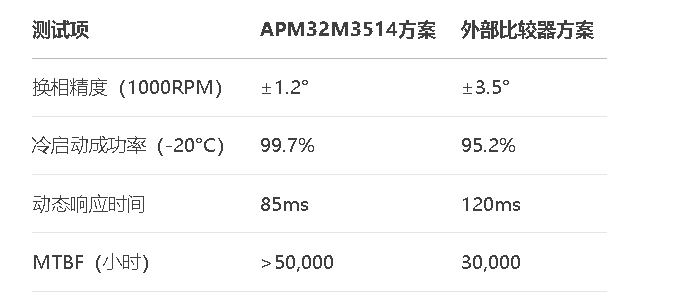
四、实测性能与优势验证
五、设计注意事项
分压网络校准:
根据实际电机反电动势幅值调整R1/R2,确保比较器输入在0.3V~3.0V线性区间。
消抖策略优化:
在高转速场景(>10,000RPM)需动态调整ZCD_DEBOUNCE_COUNT,防止误触发。
EMC兼容性:
在BEMF检测引脚并联220pF电容,抑制高频开关噪声。
极海这款APM32M3514在电机控制方面提供的硬件资源,比如高级定时器、ADC、DMA这些,确实为无感方波控制提供了不错的基础。实现无感方波控制,关键在于准确的反电动势过零检测和可靠的启动算法。这中间需要大量的理论学习和反复的实验调试。如需APM32M3514的相关开发资料请联系广东联科芯微电子有限公司的在线客服。我司是极海一级代理商,可提供开发资料和技术支持!