微控制器,传感器,工业级物联网模块-Linkchip联科芯
小小的一颗极海APM32E030芯片--ADC使用如此丰富
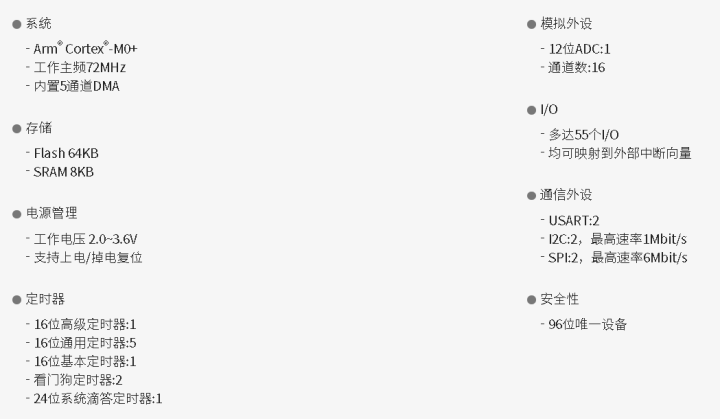
极海APM32E030是工业级基础拓展型MCU,在APM32F030性能基础上,实现了更高主频、更低功耗、以及更先进的模拟与通信接口。同时配置丰富的片上资源,可满足多行业的应用升级需求,特别是成本敏感型应用。可广泛应用于工业控制、智能家居、仪器仪表、可穿戴设备、医疗及手持设备、小家电、照明灯等领域。
下面我们来看看这颗小小的芯片ADC采样如何使用。
极海APM32E030——ADC单通道,实现ADC的采样与读取
目标:使用APM32E030芯片实现阻塞式读取ADC数值
程序中使用ADC1的通道2进行ADC的读取,初始化程序如下
void AD_Init(void)
{
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_ADC1);
RCM_EnableAHBPeriphClock(RCM_AHB_PERIPH_GPIOA);
GPIO_Config_T GPIO_InitStructure;
GPIO_InitStructure.mode = GPIO_MODE_AN;
GPIO_InitStructure.pupd = GPIO_PUPD_NO;
GPIO_InitStructure.pin = GPIO_PIN_2;
GPIO_InitStructure.speed = GPIO_SPEED_50MHz;
GPIO_Config(GPIOA, &GPIO_InitStructure);
ADC_Reset();
ADC_Config_T ADC_InitStructure;
ADC_InitStructure.resolution = ADC_RESOLUTION_12B; //ADC数据分辨率
ADC_InitStructure.scanDir = ADC_SCAN_DIR_UPWARD; //ADC扫描序列方向
ADC_InitStructure.convMode = ADC_CONVERSION_CONTINUOUS; //连续扫描
ADC_InitStructure.dataAlign = ADC_DATA_ALIGN_RIGHT; //右对齐
ADC_InitStructure.extTrigEdge = ADC_EXT_TRIG_EDGE_NONE; //禁用外部触发转换模式
ADC_InitStructure.extTrigConv = ADC_EXT_TRIG_CONV_TRG0; //ADC外部触发转换定时器1 TRG0
ADC_Config(&ADC_InitStructure);
ADC_ConfigChannel(ADC_CHANNEL_2, ADC_SAMPLE_TIME_239_5);
ADC_ReadCalibrationFactor(); //ADC 读取校准系数
ADC_Enable();
ADC_StartConversion(); //开始转换
}
uint16_t AD_getvalue(void)
{
while(ADC_ReadStatusFlag(ADC_FLAG_CC)==RESET); //转换结束标志
return ADC_ReadConversionValue();
}
此方式的ADC数值读取使用阻塞的方式,可能会阻塞主循环的其它函数,使用滑动电阻求连接ADC引脚,通过串口将采集的数据打印出来,查看是否正确
uint16_t ADvalue;
float v;
int main (void)
{
LED_init();
AD_Init();
Serial_Init(115200);
printf("APM32E030\r\n");
while(1)
{
ADvalue=AD_getvalue();
v=(float)ADvalue/4095*3.3;
printf("ADC:%f\n",v);
LED1_turn();
Delay_ms(1000);
rx_test(); //串口接收
}
}
ADC单通道+中断,实现ADC采样的与读取
目标:使用APM32E030芯片实现中断读取ADC数值
程序中使用ADC1的通道2进行ADC的读取,初始化程序如下
void AD_Init(void)
{
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_ADC1);
RCM_EnableAHBPeriphClock(RCM_AHB_PERIPH_GPIOA);
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_SYSCFG);
GPIO_Config_T GPIO_InitStructure;
GPIO_InitStructure.mode = GPIO_MODE_AN;
GPIO_InitStructure.pupd = GPIO_PUPD_NO;
GPIO_InitStructure.pin = GPIO_PIN_2;
GPIO_InitStructure.speed = GPIO_SPEED_50MHz;
GPIO_Config(GPIOA, &GPIO_InitStructure);
ADC_Reset();
ADC_Config_T ADC_InitStructure;
ADC_InitStructure.resolution = ADC_RESOLUTION_12B; //ADC数据分辨率
ADC_InitStructure.scanDir = ADC_SCAN_DIR_UPWARD; //ADC扫描序列方向
ADC_InitStructure.convMode = ADC_CONVERSION_CONTINUOUS; //连续扫描
ADC_InitStructure.dataAlign = ADC_DATA_ALIGN_RIGHT; //右对齐
ADC_InitStructure.extTrigEdge = ADC_EXT_TRIG_EDGE_NONE; //禁用外部触发转换模式
ADC_InitStructure.extTrigConv = ADC_EXT_TRIG_CONV_TRG0; //ADC外部触发转换定时器1 TRG0
ADC_Config(&ADC_InitStructure);
ADC_ConfigChannel(ADC_CHANNEL_2, ADC_SAMPLE_TIME_239_5);
/* Enable Interrupt*/
ADC_EnableInterrupt(ADC_INT_CS);
NVIC_EnableIRQRequest(ADC1_IRQn, 2);
ADC_ReadCalibrationFactor(); //ADC 读取校准系数
ADC_Enable();
/* Wait until ADC is ready */
while (!ADC_ReadStatusFlag(ADC_FLAG_ADRDY));
ADC_StartConversion(); //开始转换
}
只有ADC采集结束才会进入中断,将数据进行保存,此方式不阻塞主循环的其它函数,主循环通过串口将采集的数据进行打印,查看是否正确采集
uint16_t ADvalue;
float v;
int main (void)
{
LED_init();
Serial_Init(115200);
AD_Init();
printf("APM32E030\r\n");
while(1)
{
v=(float)ADvalue/4095*3.3;
printf("ADC:%f\n",v);
LED1_turn();
Delay_ms(1000);
rx_test(); //串口接收
}
}
void ADC1_IRQHandler(void)
{
if (ADC_ReadIntFlag(ADC_INT_FLAG_CS) == SET)
{
ADC_ClearIntFlag(ADC_INT_FLAG_CS);
ADvalue = ADC_ReadConversionValue();
}
}
ADC多通道+DMA,实现ADC采样的与读取
目标:使用APM32E030芯片实现DMA读取ADC数值
程序中使用ADC1的通道0、1、2、3进行ADC的读取,初始化程序如下
#define ADC_CH_SIZE 4
uint16_t adcData[ADC_CH_SIZE];
void DMA_Init(void)
{
DMA_Config_T dmaConfig;
RCM_EnableAHBPeriphClock(RCM_AHB_PERIPH_DMA1);
dmaConfig.peripheralAddress = ((uint32_t)ADC_BASE + 0x40);
dmaConfig.memoryAddress = (uint32_t)&adcData;
dmaConfig.direction = DMA_DIR_PERIPHERAL;
dmaConfig.bufferSize = ADC_CH_SIZE;
dmaConfig.peripheralInc = DMA_PERIPHERAL_INC_DISABLE;
dmaConfig.memoryInc = DMA_MEMORY_INC_ENABLE;
dmaConfig.peripheralDataSize = DMA_PERIPHERAL_DATASIZE_HALFWORD;
dmaConfig.memoryDataSize = DMA_MEMORY_DATASIZE_HALFWORD;
dmaConfig.circular = DMA_CIRCULAR_ENABLE;
dmaConfig.memoryTomemory = DMA_M2M_DISABLE;
dmaConfig.priority = DMA_PRIORITY_LEVEL_HIGHT;
DMA_Config(DMA1_CHANNEL_1, &dmaConfig);
DMA_Enable(DMA1_CHANNEL_1);
}
void AD_Init(void)
{
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_ADC1);
RCM_EnableAHBPeriphClock(RCM_AHB_PERIPH_GPIOA);
GPIO_Config_T GPIO_InitStructure;
GPIO_InitStructure.mode = GPIO_MODE_AN;
GPIO_InitStructure.pupd = GPIO_PUPD_NO;
GPIO_InitStructure.pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStructure.speed = GPIO_SPEED_50MHz;
GPIO_Config(GPIOA, &GPIO_InitStructure);
ADC_Reset();
ADC_Config_T ADC_InitStructure;
ADC_InitStructure.resolution = ADC_RESOLUTION_12B;
ADC_InitStructure.scanDir = ADC_SCAN_DIR_UPWARD;
ADC_InitStructure.convMode = ADC_CONVERSION_CONTINUOUS; //连续扫描
ADC_InitStructure.dataAlign = ADC_DATA_ALIGN_RIGHT; //右对齐
ADC_InitStructure.extTrigEdge = ADC_EXT_TRIG_EDGE_NONE;
ADC_InitStructure.extTrigConv = ADC_EXT_TRIG_CONV_TRG0;
ADC_Config(&ADC_InitStructure);
ADC_ConfigChannel(ADC_CHANNEL_0, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_1, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_2, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_3, ADC_SAMPLE_TIME_239_5);
DMA_Init();
ADC_ReadCalibrationFactor();
ADC_EnableDMA();
ADC_DMARequestMode(ADC_DMA_MODE_CIRCULAR);
ADC_Enable();
ADC_StartConversion();
}
uint16_t AD_getvalue(uint8_t index)
{
return adcData[index];
}
配置DMA进行ADC数据的搬运,我们只需要在必要的时候读取buff中的数据即可得到ADC采集的数据,主循环中通过串口将采集的数据进行打印,查看数据是否正确
uint16_t ADvalue;
float v;
int main (void)
{
LED_init();
Serial_Init(115200);
AD_Init();
printf("APM32E030\r\n");
while(1)
{
ADvalue=AD_getvalue(0);
v=(float)ADvalue/4095*3.3;
printf("PA0ADC:%f\n",v);
ADvalue=AD_getvalue(1);
v=(float)ADvalue/4095*3.3;
printf("PA1ADC:%f\n",v);
ADvalue=AD_getvalue(2);
v=(float)ADvalue/4095*3.3;
printf("PA2ADC:%f\n",v);
ADvalue=AD_getvalue(3);
v=(float)ADvalue/4095*3.3;
printf("PA3ADC:%f\r\n",v);
LED1_turn();
Delay_ms(1000);
rx_test(); //串口接收
}
}
ADC单通道+参考电压/温度,实现ADC采样的与读取
程序中使用ADC1的通道16/17进行ADC的读取参考电压,初始化程序如下
#include "ad.h" // Device header
void AD_Init(void)
{
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_ADC1);
ADC_Reset();
// ADC_EnableTempSensor(); //温度初始化
ADC_EnableVrefint(); //参考电压初始化
ADC_Config_T ADC_InitStructure;
ADC_InitStructure.resolution = ADC_RESOLUTION_12B; //ADC数据分辨率
ADC_InitStructure.scanDir = ADC_SCAN_DIR_UPWARD; //ADC扫描序列方向
ADC_InitStructure.convMode = ADC_CONVERSION_CONTINUOUS; //连续扫描
ADC_InitStructure.dataAlign = ADC_DATA_ALIGN_RIGHT; //右对齐
ADC_InitStructure.extTrigEdge = ADC_EXT_TRIG_EDGE_NONE; //禁用外部触发转换模式
ADC_InitStructure.extTrigConv = ADC_EXT_TRIG_CONV_TRG0; //ADC外部触发转换定时器1 TRG0
ADC_Config(&ADC_InitStructure);
// ADC_ConfigChannel(ADC_CHANNEL_16, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_17, ADC_SAMPLE_TIME_239_5);
ADC_ReadCalibrationFactor(); //ADC 读取校准系数
ADC_Enable();
ADC_StartConversion(); //开始转换
}
void AD_getvalue(void)
{
uint32_t reference_adc_value = 0, tsen_adc_value = 0;
ADC_DisableTempSensor();
// ADC_ConfigChannel(ADC_CHANNEL_16, ADC_SAMPLE_TIME_239_5);
// ADC_StartConversion();
// while(ADC_ReadStatusFlag(ADC_FLAG_CC)==RESET); //转换结束标志
// tsen_adc_value = ADC_ReadConversionValue();
// printf("tsen_adc_value: %d\n", tsen_adc_value);
ADC_StopConversion();
ADC_ConfigChannel(ADC_CHANNEL_17, ADC_SAMPLE_TIME_239_5);
ADC_StartConversion();
while(ADC_ReadStatusFlag(ADC_FLAG_CC)==RESET); //转换结束标志
reference_adc_value = ADC_ReadConversionValue();
printf("reference_adc_value: %d\n", reference_adc_value);
}
但是读取的结果与手册写的1.2v有出入,我读到的是1.5V,不知道哪里出了问题,中断与DMA的流程和之前的一样,都可以进行读取
ADC多通道+参考电压/温度,实现ADC采样的与读取
目标:使用APM32E030芯片实现DMA读取ADC数值
程序中使用ADC1的通道进行ADC的读取,初始化程序如下
#include "ad.h" // Device header
#define ADC_CH_SIZE 6
uint16_t adcData[ADC_CH_SIZE];
void DMA_Init(void)
{
DMA_Config_T dmaConfig;
RCM_EnableAHBPeriphClock(RCM_AHB_PERIPH_DMA1);
dmaConfig.peripheralAddress = ((uint32_t)ADC_BASE + 0x40);
dmaConfig.memoryAddress = (uint32_t)&adcData;
dmaConfig.direction = DMA_DIR_PERIPHERAL;
dmaConfig.bufferSize = ADC_CH_SIZE;
dmaConfig.peripheralInc = DMA_PERIPHERAL_INC_DISABLE;
dmaConfig.memoryInc = DMA_MEMORY_INC_ENABLE;
dmaConfig.peripheralDataSize = DMA_PERIPHERAL_DATASIZE_HALFWORD;
dmaConfig.memoryDataSize = DMA_MEMORY_DATASIZE_HALFWORD;
dmaConfig.circular = DMA_CIRCULAR_ENABLE;
dmaConfig.memoryTomemory = DMA_M2M_DISABLE;
dmaConfig.priority = DMA_PRIORITY_LEVEL_HIGHT;
DMA_Config(DMA1_CHANNEL_1, &dmaConfig);
DMA_Enable(DMA1_CHANNEL_1);
}
void AD_Init(void)
{
RCM_EnableAPB2PeriphClock(RCM_APB2_PERIPH_ADC1);
RCM_EnableAHBPeriphClock(RCM_AHB_PERIPH_GPIOA);
GPIO_Config_T GPIO_InitStructure;
GPIO_InitStructure.mode = GPIO_MODE_AN;
GPIO_InitStructure.pupd = GPIO_PUPD_NO;
GPIO_InitStructure.pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3;
GPIO_InitStructure.speed = GPIO_SPEED_50MHz;
GPIO_Config(GPIOA, &GPIO_InitStructure);
ADC_Reset();
ADC_EnableTempSensor();
ADC_EnableVrefint();
ADC_Config_T ADC_InitStructure;
ADC_InitStructure.resolution = ADC_RESOLUTION_12B;
ADC_InitStructure.scanDir = ADC_SCAN_DIR_UPWARD;
ADC_InitStructure.convMode = ADC_CONVERSION_CONTINUOUS; //连续扫描
ADC_InitStructure.dataAlign = ADC_DATA_ALIGN_RIGHT; //右对齐
ADC_InitStructure.extTrigEdge = ADC_EXT_TRIG_EDGE_NONE;
ADC_InitStructure.extTrigConv = ADC_EXT_TRIG_CONV_TRG0;
ADC_Config(&ADC_InitStructure);
ADC_ConfigChannel(ADC_CHANNEL_0, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_1, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_2, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_3, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_16, ADC_SAMPLE_TIME_239_5);
ADC_ConfigChannel(ADC_CHANNEL_17, ADC_SAMPLE_TIME_239_5);
DMA_Init();
ADC_ReadCalibrationFactor();
ADC_EnableDMA();
ADC_DMARequestMode(ADC_DMA_MODE_CIRCULAR);
ADC_Enable();
ADC_StartConversion();
}
uint16_t AD_getvalue(uint8_t index)
{
return adcData[index];
}
将每个通道保存到buff中,进行读取即可
uint16_t ADvalue;
float v;
int main (void)
{
LED_init();
Serial_Init(115200);
AD_Init();
printf("APM32E030\r\n");
while(1)
{
ADvalue=AD_getvalue(0);
v=(float)ADvalue/4095*3.3;
printf("PA0ADC:%f\n",v);
ADvalue=AD_getvalue(1);
v=(float)ADvalue/4095*3.3;
printf("PA1ADC:%f\n",v);
ADvalue=AD_getvalue(2);
v=(float)ADvalue/4095*3.3;
printf("PA2ADC:%f\n",v);
ADvalue=AD_getvalue(3);
v=(float)ADvalue/4095*3.3;
printf("PA3ADC:%f\r\n",v);
ADvalue=AD_getvalue(4);
printf("TempSensor:%d\r\n",ADvalue);
ADvalue=AD_getvalue(5);
printf("Vref:%d\r\n",ADvalue);
LED1_turn();
Delay_ms(1000);
rx_test(); //串口接收
}
}
以上关于极海APM32E030芯片ADC的使用介绍就这些,对于基准电压的采集,后续再同步更新。如需了解极海APM32E030芯片相关资源,可联系极海代理商-联科芯微电子,联系电话:15994707769,LEO WANG。